Paper
[PAPER] Thruster-Assisted Incline Walking of a Legged-Aerial Robot Using Reduced Order Model and Collocation Method
2025 American Control Conference (ACC)
Abstract
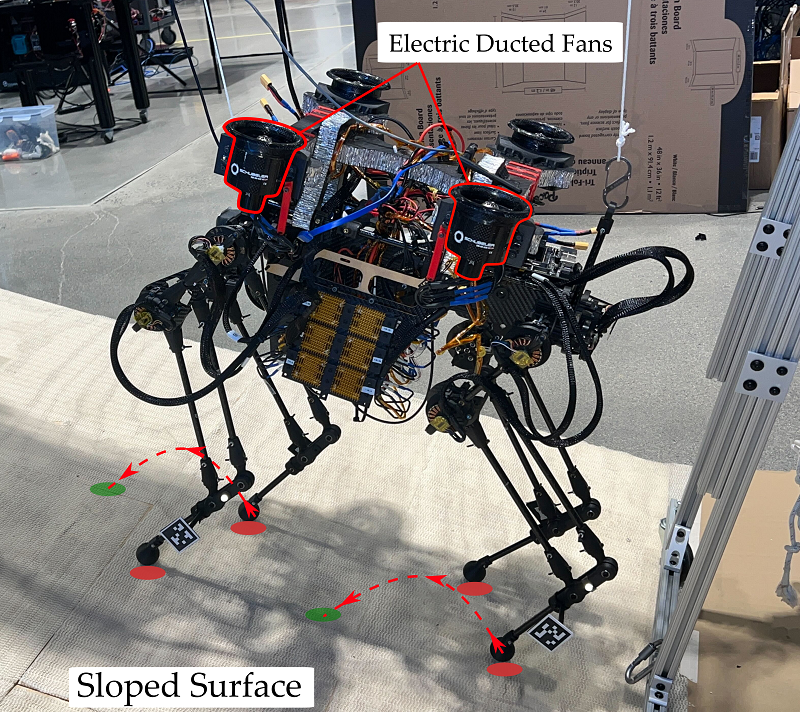
In this study, our aim is to evaluate the effectiveness of thruster-assisted steep slope walking for the Husky Carbon, a quadrupedal robot equipped with custom-designed actuators and plural electric ducted fans, through simulation prior to conducting experimental trials. Thruster-assisted steep slope walking draws inspiration from wing-assisted incline running (WAIR) observed in birds, and intriguingly incorporates posture manipulation and thrust vectoring, a locomotion technique not previously explored in the animal kingdom. Our approach involves developing a reduced-order model of the Husky robot, followed by the application of an optimization-based controller utilizing collocation methods and dynamics interpolation to determine control actions. Through simulation testing, we demonstrate the feasibility of hardware implementation of our controller.