Paper
[PAPER] Heading Control for Obstacle Avoidance using Dynamic Posture Manipulation during Tumbling Locomotion
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Abstract
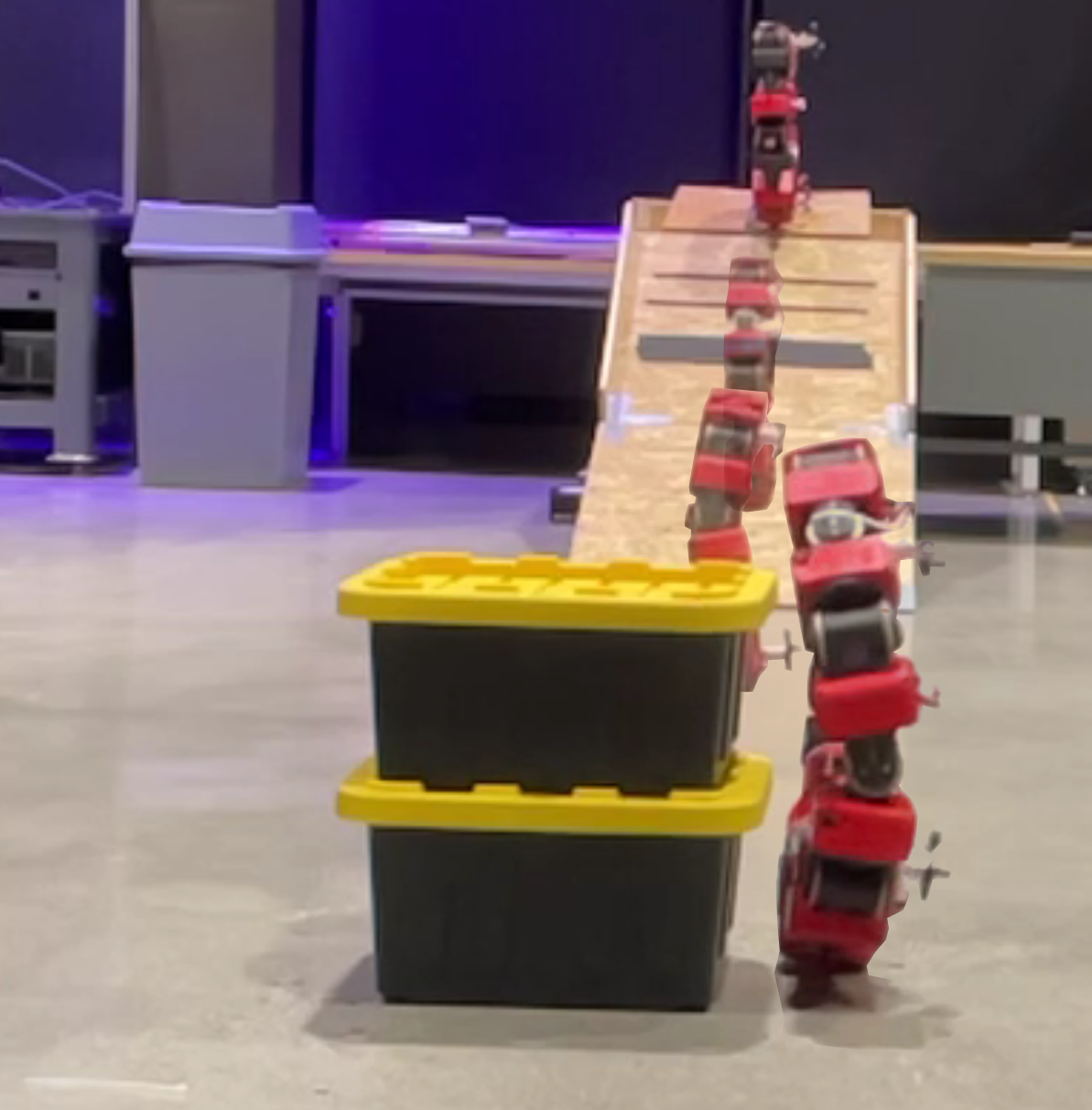
Passive tumbling structures are energy efficient, but often sacrifice control authority due to their under actuated nature. Unlike many passive tumbling robots, Northeastern University’s COBRA is a snake robot with eleven articulated joints that transforms into a wheel-like structure with a high degree of posture control during tumbling, and using this posture manipulation, COBRA can control its forward velocity and heading angle while tumbling. This paper presents a mathematical framework that describes the dynamics of posture manipulation during tumbling and identifies two types of control actions that allow it to control its movement. This is validated in hardware testing to demonstrate obstacle avoidance during passive tumbling using only posture manipulation.