Paper
[PAPER] Vision-Guided Loco-Manipulation with a Snake Robot
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Abstract
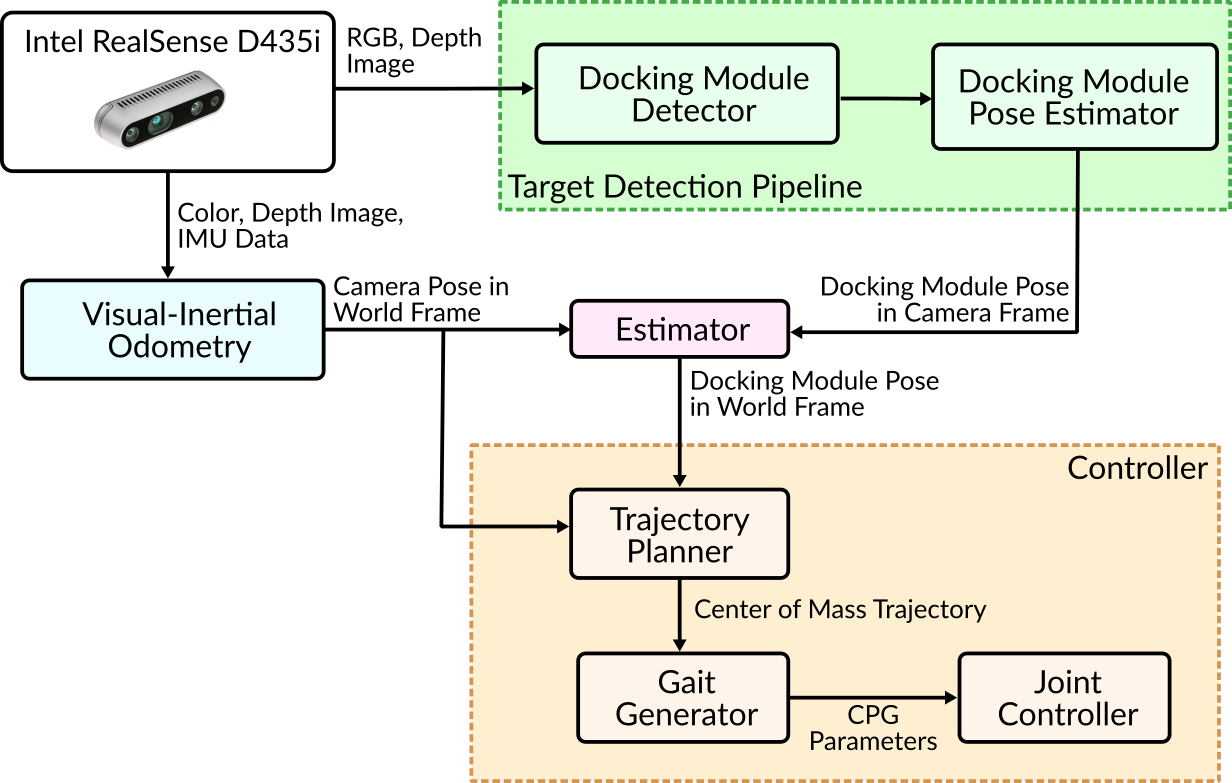
This paper presents the development and integration of a vision-guided loco-manipulation pipeline for Northeastern University’s snake robot, COBRA. The system leverages a YOLOv8-based object detection model and depth data from an onboard stereo camera to estimate the 6-DOF pose of target objects in real time. We introduce a framework for autonomous detection and control, enabling closed-loop loco-manipulation for transporting objects to specified goal locations. Additionally, we demonstrate open-loop experiments in which COBRA successfully performs real-time object detection and loco-manipulation tasks.