Paper
[PAPER] Actuation and Flight Control of High-DOF Dynamic Morphing Wing Flight by Shifting Structure Response
2023 62nd IEEE Conference on Decision and Control (CDC)
Abstract
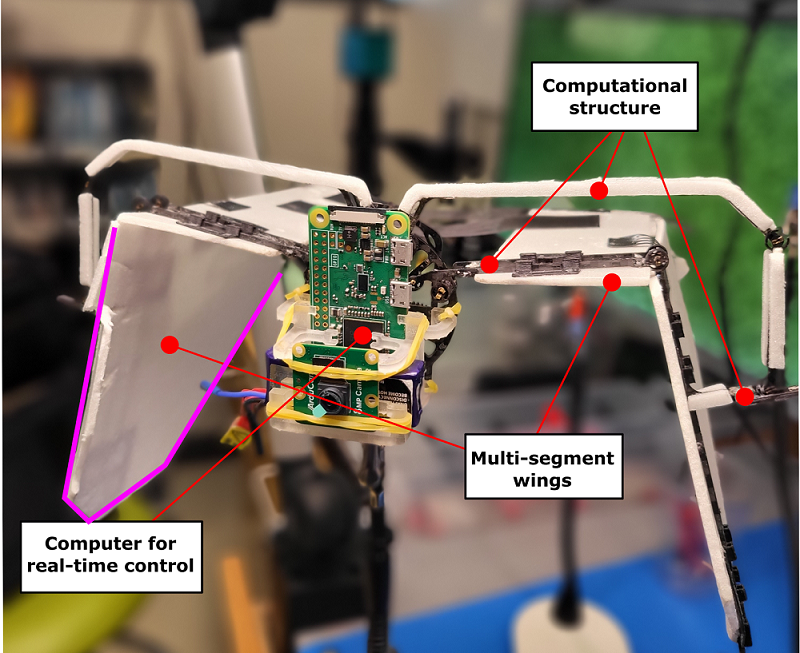
Bat's dynamically morphing wings are highly versatile with many active and passive modes which allows them to display highly dexterous flight maneuvers. We take inspiration from bat wings and attempt to mimic their high degrees of freedom and flexibility in our small bat robot with dynamically morphing wings called the Aerobat. This small robot uses linkages, or computational structure, to animate the robot's flapping gait. In this work, we present the theoretical framework of using small low-energy actuators, called the primers, to adjust highly sensitive linkages length for changing the robot's flapping gait and use it to control the robot's orientation. This method is applied in a dynamic simulation to show its feasibility.