Paper
[PAPER] Posture manipulation of thruster-enhanced bipedal robot performing dynamic wall-jumping using model predictive control
2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids)
Abstract
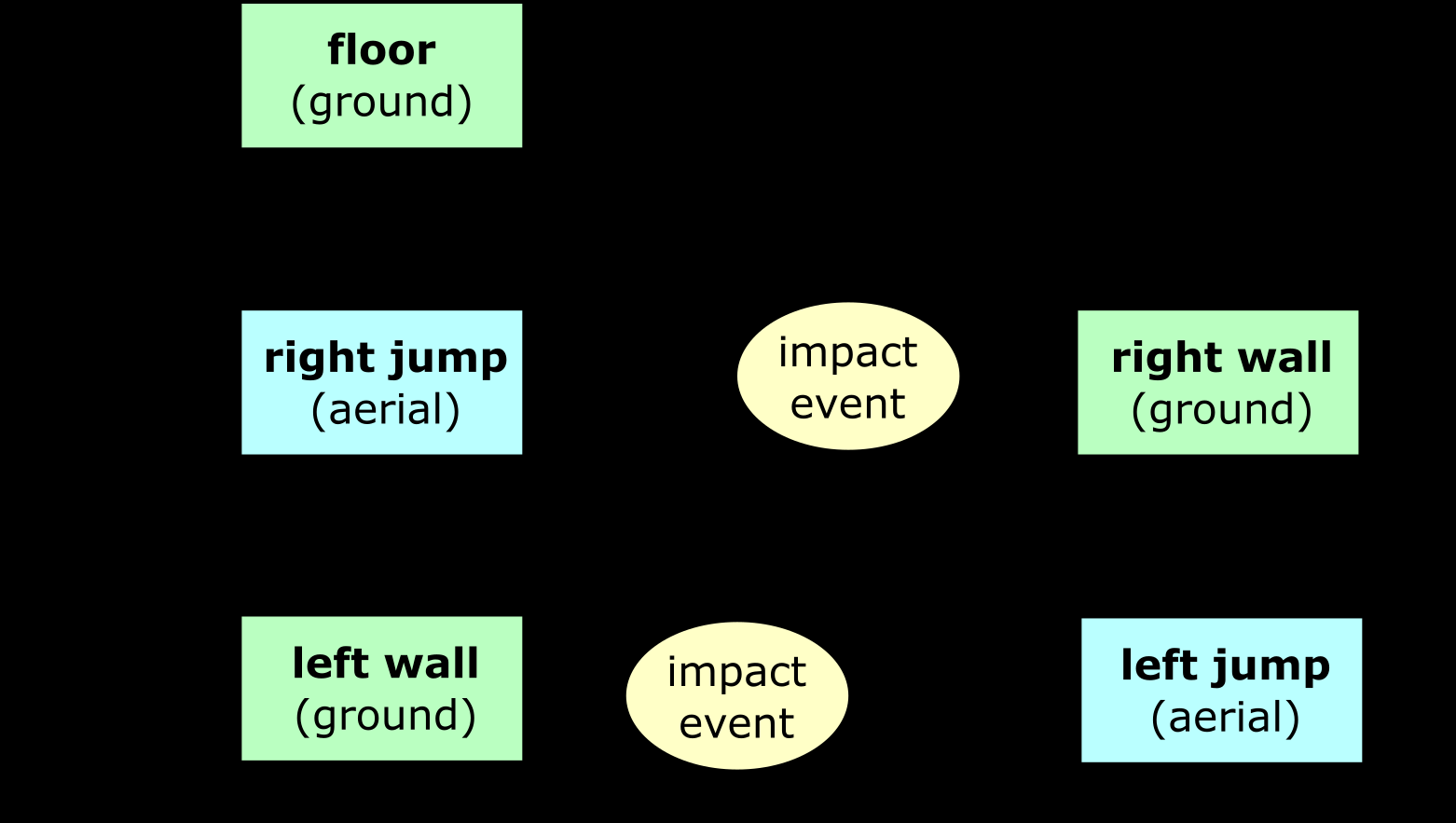
Multi-modal mobility in robots can enable versatile, adaptable, and plastic locomotion in various environments. The additional mode of mobility can allow the robot to perform maneuvers that it can’t do with a single mode of locomotion and expand the range of locomotion that the robot can do. In this work, we look at a legged-thruster multi-modal robot, Harpy, to perform a multiple wall jump maneuver and vertically climb inside a vent. The problem is defined using a simplified planar reduced order model using a single inertial body and a hybrid model. The controller utilized MPC while on the wall to satisfy the no-slip ground constraints, and the controller’s performance is shown in simulations.